Automate Thread Gaging

Automatic thread checking makes the job of 100% inspection easier and more accurate. Source: SMAC
The effort to reduce problems and increase durability in automobiles and other complicated mechanisms is a prime factor in quality control development. Statistics have played a major role in improvement. But producing the huge variety of parts and then assembling them forces the manufacturer to deal with a great number of variables, each of which has the ability to change and create problems.
A good quality control system has a number of key elements: controlled processes, good documentation and good data, along with the ability to verify the quality level of each individual product and filter out those not meeting the quality standard. It also should have the ability to adjust processes to eliminate problems.
A significant challenge has been finding the tools that can verify the quality level of individual products, particularly when the level of precision is high and the quantities are large.
Cameras and lasers have been applied to this problem with some success. But these devices are limited because of difficult shop environments and when the areas requiring inspection are internal-as with threads and bores.
Because of the push toward 100% inspection and the limitations of older technology such as lasers and cameras, a new generation of robotic devices are emerging, which overcome the limitations of these past technologies.
For instance, a linear rotary motor combination developed initially for precise electronic parts assembly has been successfully used in more than 100 field applications to 100% inspect machined threads on the shop floor.
The device is made up of a single pole linear motor whose piston carries a rotary servo motor. The linear motor is servo positioned using its integrated linear encoder. The single coil allows the operator to program speed, position and, uniquely, force. The rotary servo can be programmed in position speeds and torque modes as well.
The shaft has a manual thread gage attached to it and has several degrees of play allowing lineup of the gage to the automatically positioned part.
A standard go thread gage member attached to the end of the shaft of the linear/rotary actuator can be programmed to do this typical thread check operation as follows, based on the customer’s requirements:
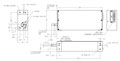
The device is made up of a single pole linear motor whose piston carries a rotary servo motor. Source: SMAC
2. Soft-land: The linear axis searches for the part in a soft-land mode. The soft-land mode prevents damage from occurring to the thread gage member as well as damage occurring to the threaded part. After the soft-land is completed, the linear position can be checked to verify that the starting height is within a settable tolerance.
This also is useful when verifying that a counter bore is present. At this time, the linear position can be stored as a reference for the starting height location for that particular part setting in the fixture. This allows for flexibility of the height of the part setting in the fixture.
3. Locating first thread: This is optional. The rotary can rotate in reverse while the linear is monitored to locate the thread of the gage member and the first thread of the part is aligned. Also, double-tapped conditions can be checked for. The rotary position of the first thread is stored, and then the actuator rotates in reverse for 360 degrees while monitoring for another lead in thread on the part. If another thread is found, the part is failed and an error message can be sent. If another thread is not located, the actuator is back where it started, and this linear position can be stored as the reference starting height location.
4. Starting into the thread: The rotary starts running forward and, if the hole is threaded, the linear axis will begin extending. If the thread is not present, the linear axis will not extend indicating a “no thread present” error message as well as sending a failed part message.
5. Monitoring the threaded hole condition: The rotary continues to thread into the hole, and both axes are monitored for error conditions, rotary torque and linear position. Also, a target depth for a minimum thread depth condition is monitored. The minimum thread depth location can be calculated on the fly and can be based on the learned linear height reference position that was stored earlier in the cycle.
6. If there is a condition that would be considered a failure-for example, shallow/dull or broken tap, debris and cross threading-this is detected by the rotary axis and the part would be rejected. If the linear calculated minimum thread depth is achieved, and no failure conditions are detected to this point, the thread can be considered good, unless further testing is desired such as thread depth or oversized thread conditions. If so, continue to the next step. If these are not required then the cycle is completed.
7. Thread depth and oversized thread: If the complete thread depth is required, the actuator can continue threading in and monitoring for the bottom of the threaded hole. After it is located, the actuator can report the threaded hole depth as well as the number of threads. Now it can rotate in reverse to a pre-calculated location near the start of the threaded hole. After the linear axis locates the position, the rotary axis is stopped, and the linear axis can extend and store the position. From these two positions, the thread clearance can be calculated and compared to a pass/fail limit for the thread oversize condition.

Automatic thread checking has become a much more economical solution than older generation noncontact methods. Source: SMAC
An interesting additional benefit is in gage compatibility. Principal automatic measuring systems are checked periodically by off-line manual stations. If the two measurement methods are different-such as cameras and calipers, for example-this can lead to an error from the different measurement methods.
A better solution is always to use the same basic method in both the manual and automatic systems.
Certain thread check systems do just that. In fact these systems automate the normally used manual thread gage, and replace the human hand with a robotic one.
Robotic measurement tools:
Automatic thread checking, multi-axis coordinate measurement verification systems, robotic calipers and the like make the job of 100% check easier and more accurate. And as cost drops, they also become much more economical solutions than older generation noncontact methods. Q
Quality Online
For more information on thread checking, visit www.qualitymag.com to read these articles:Tech Tips
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




