Why Machine Vision Needs Standards
Don't underestimate the impact standards have had in making vision more robust and affordable.

In the world of machine vision, which effectively started at the beginning of the 1980s, it was natural for systems using area scan cameras to use nationally or internationally agreed upon standards for the transmission of TV-type images. These standards (RS170 in North America, CCIR in Europe) specify an analog method of transmission and were developed at a time when video cameras used thermionic tubes such as the vidicon and Plumbicon as their sensors. These electron scanning tubes have no inherent pixel structure so there was never any incentive to preserve any such structure in the transmission from camera to processor. It was-and is-very convenient that such standards exist and allow a camera from one supplier to be simply plugged in to a device-frame grabber or display monitor-from a different manufacturer, and because they both conform to the same standard, the two work together.
Solid state sensors for area scan cameras began to take over from thermionic tubes in the early 1980s, though it was many years before the spatial resolution of thermionic tubes could be matched, and some of the early solid state cameras had a very limited dynamic range and the response of individual sensor sites or columns of sites varied considerably, resulting in fixed pattern shading.
However, right from the start, the solid state sensors had one advantage over thermionic tubes: they were geometrically stable and the geometry was near perfect compared with the tubes, which could suffer from all the distortions and non-linearities of a scanned electron beam and change over time. This included short term as the camera warmed up, long term over days and weeks, and unpredictably under the influence of magnetic or electrostatic fields.
As manufacturing techniques improved, the geometrical perfection of the sensors became superlative, with every sensor site the same dimensions, laid out in a perfectly rectangular array. This was ideal for industrial applications requiring precise measurements.
Unfortunately, having collected image data from these precisely sized and spaced sensor elements, the charge resulting from the photons arriving at each site was mixed into a continuous analog stream in order to be transferred (in one of the CCTV-standard formats) to the frame grabber in the processor, where an analog-to-digital converter (A/D device) chops the stream into packets and assigns a digital signal level (typically 0 to 255) to each packet, and puts that level (the gray level) into a memory address.
This memory address corresponds to a single picture element or pixel, the smallest unit of information about the image which will be used in all subsequent processing. Unfortunately, the pixel derived from an analog stream does not necessarily correspond with the geometrically perfect “pixel” (strictly, sensor site) in the camera.
Incidentally, note that line scan cameras never had the benefit of analog standards; there was never a mass market for line scan cameras comparable to the area scan market, although the devices themselves are widely used in fax machines and document scanners. This used to mean that a line scan camera would only communicate with an interface board from the same manufacturer plugged into the processor system. With the advent of software-programmable interface boards, one was freed from the need to “same source” the line scan camera and interface, though it is still necessary to set up the interface to suit the camera to be used.

If one can abandon the use of analog transmission, putting the digitization of the energy levels from the sensor sites into the camera itself, and transmitting the resulting gray-level information in digital format to the processor, then total pixel synchronous acquisition can be achieved with no mixing of data between sites except that which may occur inside the silicon of the sensor itself, perhaps by “blooming” of sites which have received more photons than they can cope with in the exposure period. Moreover, once the continuous-range gray levels have been digitized-with minimal noise arising within the camera-the digitized signals can be transmitted over a considerable distance with no danger of noise or other interference to the interpretation of the signal at the far end.
What is the advantage of pixel synchronous acquisition? The most important reason for wanting pixel synchronous image acquisition is that it enables the system to take full advantage of the geometrical perfection of the sensor structure, allowing sub-pixel interpolation of measurements. This sub-pixel capability is useful when using vision for statistical process control, where typically one wishes the reproducibility of measurement to be one-tenth or even one-twentieth of the tolerance range.
The same year saw the agreement of the original IEE1394 (Firewire) standard which, in theory, made it possible to transfer digital video straight into computer memory without the intervention of a frame grabber. The advent of Windows 95 made programming via a graphical user interface widely available. This year also saw the first USB standard, though few machine vision cameras used it until its faster successor USB2 came along.
The turn of the century saw the emergence of the Camera Link standard, the first standard developed specifically and solely for the machine vision industry. Initially this standard did not include a facility for power to be transmitted over the cable, but more recently the standard has been expanded to Power Over Camera Link (POCL). There is currently a proposal for an even faster version of Camera Link known as HSLink, important for digital cameras which can now have more than 10 million pixels.
All these interfaces, Camera Link, IEE1394 and USB suffer limitations on the allowed cable length between camera and processor, unless signals are converted to travel on fiber optic cable. Between 2003 and 2006, the GigE Vision and GenICam standards were developed by a consortium of the industry’s camera manufacturers and suppliers using the Gigabit Ethernet communication protocol. GigE Vision allows for fast image transfer using low-cost standard cables over very long lengths, so that the processor can be housed in an office environment away from the production line environment.
The GigE Vision and GenICam standards also facilitate interfacing between cameras and frame grabbers from different manufacturers. The GigE Vision Standard is hosted by the Automated Imaging Association while the GenICam standard, which allows cameras and processors to communicate with each other to determine what facilities the camera has and how they can be controlled, is hosted by the European Machine Vision Association.
More recently, at the Stuttgart Vision show in November 2009, the prize jury was unanimous in selecting CoaXPress as the Vision Award winner; this is a new digital interface technology capable of sending high speed video, communication, control and power over one standard coaxial cable. This was invented by a consortium headed by Adimec Advanced Imaging of the Netherlands, including Active Silicon Ltd. from the United Kingdom. It is intended that this will become a free-to-use standard, probably hosted by the Japanese Industrial Imaging Association which has several members interested in using it.
The use of coaxial cable means that, like GigE Vision, the processor can be in an office environment (up to 170 meters from the camera), leaving only the small camera to be housed in a washdown-proof enclosure.
Moreover the link is relatively cheap, the terminations can be assembled on site after the cable has been drawn through ducting, and if a digital camera is replacing an analog one, the cable may already be in place. CoaXPress can handle higher data rates than GigE and does not suffer the timing uncertainties of that alternative long distance option.
For many users, the primary advantage of CoaXPress is probably one of speed; it is faster than the fastest current standard interface for digital cameras, Camera Link, which has severe length limitations relative to GigE or CoaXpress, though certain versions of HSLink are expected to be even faster. Q
A robotic vision pick and place system is shown here. Source: FS-Systems Ltd.
In the world of machine vision, which effectively started at the beginning of the 1980s, it was natural for systems using area scan cameras to use nationally or internationally agreed upon standards for the transmission of TV-type images. These standards (RS170 in North America, CCIR in Europe) specify an analog method of transmission and were developed at a time when video cameras used thermionic tubes such as the vidicon and Plumbicon as their sensors. These electron scanning tubes have no inherent pixel structure so there was never any incentive to preserve any such structure in the transmission from camera to processor. It was-and is-very convenient that such standards exist and allow a camera from one supplier to be simply plugged in to a device-frame grabber or display monitor-from a different manufacturer, and because they both conform to the same standard, the two work together.
Solid state sensors for area scan cameras began to take over from thermionic tubes in the early 1980s, though it was many years before the spatial resolution of thermionic tubes could be matched, and some of the early solid state cameras had a very limited dynamic range and the response of individual sensor sites or columns of sites varied considerably, resulting in fixed pattern shading.
However, right from the start, the solid state sensors had one advantage over thermionic tubes: they were geometrically stable and the geometry was near perfect compared with the tubes, which could suffer from all the distortions and non-linearities of a scanned electron beam and change over time. This included short term as the camera warmed up, long term over days and weeks, and unpredictably under the influence of magnetic or electrostatic fields.
As manufacturing techniques improved, the geometrical perfection of the sensors became superlative, with every sensor site the same dimensions, laid out in a perfectly rectangular array. This was ideal for industrial applications requiring precise measurements.
Unfortunately, having collected image data from these precisely sized and spaced sensor elements, the charge resulting from the photons arriving at each site was mixed into a continuous analog stream in order to be transferred (in one of the CCTV-standard formats) to the frame grabber in the processor, where an analog-to-digital converter (A/D device) chops the stream into packets and assigns a digital signal level (typically 0 to 255) to each packet, and puts that level (the gray level) into a memory address.
This memory address corresponds to a single picture element or pixel, the smallest unit of information about the image which will be used in all subsequent processing. Unfortunately, the pixel derived from an analog stream does not necessarily correspond with the geometrically perfect “pixel” (strictly, sensor site) in the camera.
Incidentally, note that line scan cameras never had the benefit of analog standards; there was never a mass market for line scan cameras comparable to the area scan market, although the devices themselves are widely used in fax machines and document scanners. This used to mean that a line scan camera would only communicate with an interface board from the same manufacturer plugged into the processor system. With the advent of software-programmable interface boards, one was freed from the need to “same source” the line scan camera and interface, though it is still necessary to set up the interface to suit the camera to be used.
Cognex vision sensors are placed on robotic arms to verify engine motor assembly. Source: Cognex
Technology Continues to Advance
Beginning in the late 1980s solid state cameras with digital outputs began to appear, notably Kodak Megaplus devices. In their early years, these cameras suffered from the same problem of lack of transmission standards as the line scan cameras, requiring a matching interface device in the processor. One way around the problem was to integrate the camera and processor, and this is what Professor Steve Dickerson of Georgia Tech did at the beginning of the 1990s, resulting in the DVT vision company and its “smart cameras.”If one can abandon the use of analog transmission, putting the digitization of the energy levels from the sensor sites into the camera itself, and transmitting the resulting gray-level information in digital format to the processor, then total pixel synchronous acquisition can be achieved with no mixing of data between sites except that which may occur inside the silicon of the sensor itself, perhaps by “blooming” of sites which have received more photons than they can cope with in the exposure period. Moreover, once the continuous-range gray levels have been digitized-with minimal noise arising within the camera-the digitized signals can be transmitted over a considerable distance with no danger of noise or other interference to the interpretation of the signal at the far end.
What is the advantage of pixel synchronous acquisition? The most important reason for wanting pixel synchronous image acquisition is that it enables the system to take full advantage of the geometrical perfection of the sensor structure, allowing sub-pixel interpolation of measurements. This sub-pixel capability is useful when using vision for statistical process control, where typically one wishes the reproducibility of measurement to be one-tenth or even one-twentieth of the tolerance range.
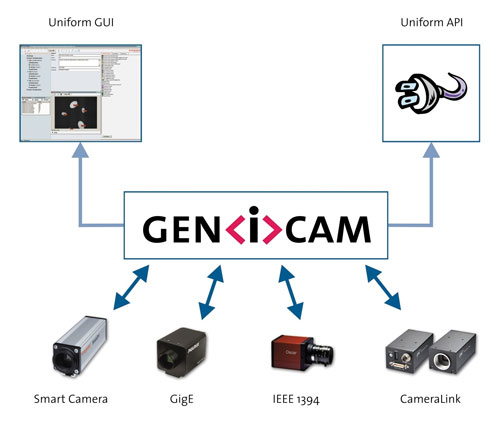
The GenICam standard is hosted by the European Machine Vision Association. Source: Stemmer Imaging
Significant Changes
The year 1995 saw several events of significance to the vision community. The most important of these was probably the introduction of the PCI bus, the first standard PC bus that could handle video data at full speed, though the proprietary Apple Nubus had been doing so for several years.The same year saw the agreement of the original IEE1394 (Firewire) standard which, in theory, made it possible to transfer digital video straight into computer memory without the intervention of a frame grabber. The advent of Windows 95 made programming via a graphical user interface widely available. This year also saw the first USB standard, though few machine vision cameras used it until its faster successor USB2 came along.
The turn of the century saw the emergence of the Camera Link standard, the first standard developed specifically and solely for the machine vision industry. Initially this standard did not include a facility for power to be transmitted over the cable, but more recently the standard has been expanded to Power Over Camera Link (POCL). There is currently a proposal for an even faster version of Camera Link known as HSLink, important for digital cameras which can now have more than 10 million pixels.
All these interfaces, Camera Link, IEE1394 and USB suffer limitations on the allowed cable length between camera and processor, unless signals are converted to travel on fiber optic cable. Between 2003 and 2006, the GigE Vision and GenICam standards were developed by a consortium of the industry’s camera manufacturers and suppliers using the Gigabit Ethernet communication protocol. GigE Vision allows for fast image transfer using low-cost standard cables over very long lengths, so that the processor can be housed in an office environment away from the production line environment.
The GigE Vision and GenICam standards also facilitate interfacing between cameras and frame grabbers from different manufacturers. The GigE Vision Standard is hosted by the Automated Imaging Association while the GenICam standard, which allows cameras and processors to communicate with each other to determine what facilities the camera has and how they can be controlled, is hosted by the European Machine Vision Association.
More recently, at the Stuttgart Vision show in November 2009, the prize jury was unanimous in selecting CoaXPress as the Vision Award winner; this is a new digital interface technology capable of sending high speed video, communication, control and power over one standard coaxial cable. This was invented by a consortium headed by Adimec Advanced Imaging of the Netherlands, including Active Silicon Ltd. from the United Kingdom. It is intended that this will become a free-to-use standard, probably hosted by the Japanese Industrial Imaging Association which has several members interested in using it.
The use of coaxial cable means that, like GigE Vision, the processor can be in an office environment (up to 170 meters from the camera), leaving only the small camera to be housed in a washdown-proof enclosure.
Moreover the link is relatively cheap, the terminations can be assembled on site after the cable has been drawn through ducting, and if a digital camera is replacing an analog one, the cable may already be in place. CoaXPress can handle higher data rates than GigE and does not suffer the timing uncertainties of that alternative long distance option.
For many users, the primary advantage of CoaXPress is probably one of speed; it is faster than the fastest current standard interface for digital cameras, Camera Link, which has severe length limitations relative to GigE or CoaXpress, though certain versions of HSLink are expected to be even faster. Q
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




