Helping Robots Stay on Target
Both accuracy and repeatability are key performance characteristics that influence the robot's ability to meet a manufacturing process's needs.
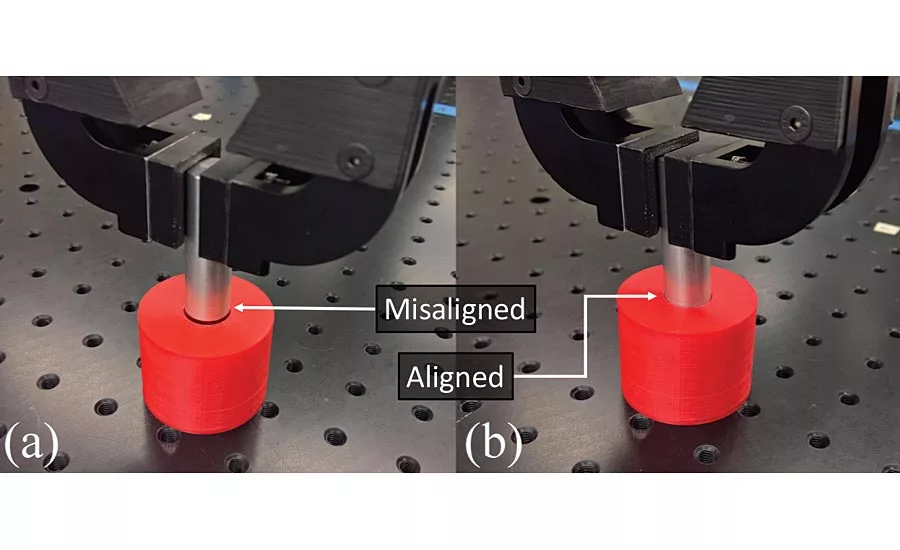
Figure 1: Misalignments (translation or angle errors) result in failure of operation or damage to part or robot.
For decades, many manufacturers have counted on robots to tirelessly produce parts of predictable quality. One of the key attributes of robots is their repeatability, which means that their tool tip will return to the same pre-programmed location with a known and relatively small error. Repeatability plays a role in ensuring predictability so that production stays within quality targets and the downstream processes receive parts meeting the required tolerances. It is critical to note that repeatability is distinct from accuracy. A robot may position its end of arm tool (EOAT) at the same location with minimal errors (repeatability), but that location may not be where it should be (accuracy). Both accuracy and repeatability are key performance characteristics that influence the robot’s ability to meet a manufacturing process’s needs.
Generally, a robot’s repeatability and accuracy are not achieved without upfront preparations and maintenance activities. As robots evolve to become more affordable and useful, a greater number of manufacturers are able to adopt them, including smaller enterprises. In many cases, the new users of robots are faced with having to educate themselves about concepts related to repeatability and accuracy that may seem esoteric. In this article, we discuss some factors for manufacturers to consider and possible tools that may help.
A new generation of robots that is deemed collaborative presents new opportunities and challenges for utilization by a broader swath of manufacturers. The term “collaborative” refers to their ability to follow technical requirements in new safety standards [REF-ISO]. Generally speaking, the standards allow—after an appropriate risk assessment—robots to safely operate within reach of humans. The primary collaborative modes of operation are speed and separation monitoring and power and force limiting. Speed and separation monitoring (SSM) is typically used with larger, more powerful robots where sensors are used to detect and track humans or other objects in the robot’s work volume, where the robot slows down or stops depending on their proximity. Power and force limiting (PFL) allows incidental contact between a robot and human, because the robot’s impact forces are kept below specified thresholds. In general, PFL-capable robots tend to be smaller, lighter, and slower. Some PFL-capable robots are also designed to be compliant if they hit something, hence they are less rigid than traditional robots. This compliance can result in degraded repeatability and accuracy.
Because of their lighter weight and smaller size, collaborative robots with PFL are easier to move around a factory floor to wherever they are most needed. The ability to easily reposition and repurpose robots provides valuable flexibility but also increases the uncertainty in the robot’s positioning accuracy. If the arm is repeatedly bumped or subjected to extraneous stresses, the robot’s repeatability is impacted as well. Techniques for teaching the robot its tasks are easier than for traditional industrial robots and many include the option of hand-guiding the arm to the locations it has to learn. Robots are now more commonly equipped with sensors to help them be aware of their work area (in addition to sensors that detect and track humans for SSM safety). The relationship between the robot EOAT and sensor coordinate systems must be calculated for the robot’s movements to align with what it sees so that it performs correctly.
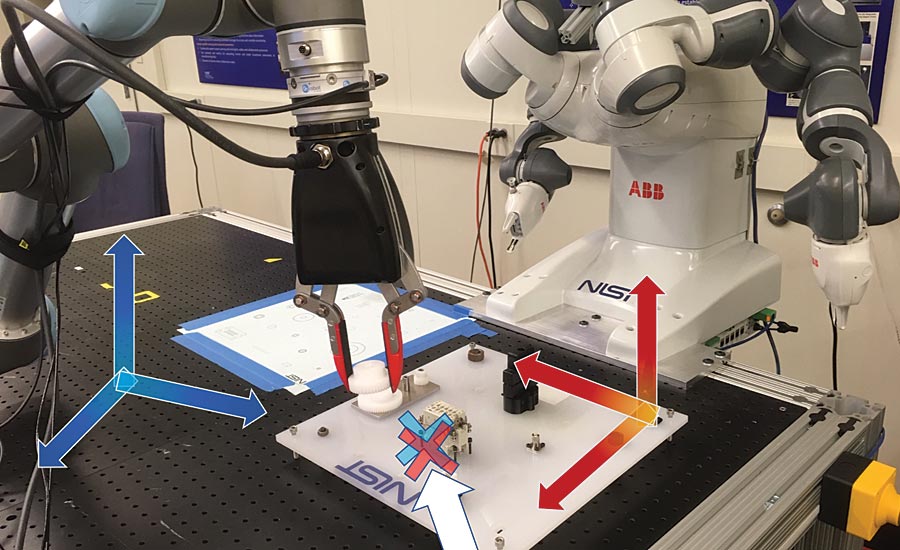
Figure 2: Registration between two robots to complete a shared task of assembling parts using a shared coordinate space. Registration uncertainty manifests as positional and orientation errors in the work space (white arrow).
The same features that make collaborative robots appealing for a broader segment of manufacturers, including small-to-medium-sized manufacturers, introduce the need for techniques—calibration and registration—to improve repeatability and accuracy periodically. [REF-8093] A suite of tools to assist in performing calibrations and registrations is being created by the United States National Institute of Standards and Technology (NIST). This work is part of NIST research programs that are driving innovation and reducing risks of adoption of smart manufacturing technologies through measurement science, tools, and technical foundations for standards.
One example is a quick method to align a collaborative robot with parts or other equipment (including robots) with which it is coordinating. The procedure is based upon adjustingthe robot’s tool tip with respect to registration points on its worktable, and can be scaled based on the size of the work area and application. The process is relatively simple: identify three or more points within the work area that can be reached by the robot’s tool tip, record the robot’s pose in its base frame and the respective work space coordinates, then calculate the transformation (X, Y, and Z offsets and rotations) from the robot’s base to the work area’s “home” location [REF-Marvel].
This transformation is then used to convert the robot’s pose into coordinates of any space or equipment (including sensors or other robots) to which it has been registered. The number of registration points scales with the accuracy and size of the work volume desired, with more points generally increasing performance overall. Registration can be achieved in a matter of seconds, and enables a single-task program to be reused without needing to adjust taught positions. NIST also provides additional tools to measure and report the quality of this registration, and even improve the quality of registration using machine learning [REF-VanWyk]. This registration quality assessment enables the user to quickly recognize when they need to simply re-run the registration process, rather than spend hours trying to figure out why the robot’s transformed position is not what is expected.
A robot’s adaptability and autonomy is reliant on sensing. Ensuring that the alignment of the robot’s coordinate system and that of the sensor(s) that provide the robot with information about the current state of the world is essential. Additional tools developed by NIST include methods for improving the registration between the robot and its perception system. [REF-8198] These tools produce a detailed mapping of the environment, and provide pinpoint transformations between the robot and the perception system’s working volume. This process, while more involved than the three-point method described earlier, significantly improves the accuracy and repeatability of the robot’s registration with respect to the world observable by the perception system. This process enables greater precision in task operations at the cost of more data collection and more complex calculations. A detailed, step-by-step guide for implementing this process is described by NIST at https://www.nist.gov/el/intelligent-systems-division-73500/restoration-rigid-body-condition-rrbc-method-improve [REF-NIST], and includes details of intended audiences (i.e., who would benefit from reviewing the material) and example implementations.
Ideally, the positioning accuracy of the robot is tracked so that degradations are detected before they affect production performance. The repeatability of a robot can be affected by, for example, mechanical degradation such as wear or gradual misalignment in its joint components, or changes to the environment such as the robot’s position gradually changing (e.g., if the robot is mounted on a cart or other mobile platform). NIST research is investigating easy-to-adopt methods for measuring and monitoring positioning accuracy, repeatability, and sources of error. [REF-Weiss1] [REF-Weiss2] These include a methodology for selecting measurement points along the workcell’s or robot’s kinematic chain to gain information about which components may be degrading and causing problems in the equipment’s operation. A novel sensor to pair with the kinematic chain methodology is being developed to support identification of degradation contributors in low-cost, minimally invasive ways.
The flexibility, ease of repositioning, and newer designs of collaborative robots provide greater usability and applicability, including by small manufacturers. However, the robot’s positioning accuracy may drift or be out of specification due to being bumped or not being coordinated with where its sensors are detecting objects in the workspace. Being aware of these conditions is important to maintain the robot’s reliable performance and, in turn, maintain the necessary productivity and quality targets of the process that the robot is enabling/contributing. We presented a few examples of tools and devices that can help. Additional information is available at https://www.nist.gov/el/intelligent-systems-division-73500/calibration-and-registration-tools.
References
[REF-ISO] “ISO/TS 15066 Robotics and robotic devices - Collaborative robots,” International Organization for Standardization (ISO), Standard, 2016.
[REF-8093] Marvel, J., Messina, E., Antonishek, B., Fronczek, L., Van Wyk, K., Tools for Robotics in SME Workcells: Challenges and Approaches for Calibration and Registration, NIST Interagency/Internal Report (NISTIR) 8093, Gaithersburg, MD, USA, November 2015.
[REF-Marvel] Marvel, J.A., Van Wyk, K., “Simplified Framework for Robot Coordinate Registration for Manufacturing Applications,” 2016 IEEE International Symposium on Assembly and Manufacturing (ISAM), Fort Worth, TX, United States, 08/21/2016 to 08/24/2016.
[REF-VanWyk] Van Wyk, K., and Marvel, J.A., “Strategies for Improving Robot Registration Performance.” IEEE Transactions on Automation Science and Engineering. Volume 15, Issue 1. 2018.
[REF-8198] Cheok, G., Franaszek, M., Van Wyk, K., Marvel, J., “Improving Automated Insertion Applications by Restoring Rigid-Body Condition in Point-Based Registration,” NIST Interagency/Internal Report (NISTIR) 8198r1, Gaithersburg, MD, USA, March 2018.
[REF-NIST] https://www.nist.gov/el/intelligent-systems-division-73500/restoration-rigid-body-condition-rrbc-method-improve. Accessed July 30th, 2019.
[REF-Weiss1] Weiss, B., “Developing Measurement Science to Verify and Validate the Identification of Robot Workcell Degradation,” Proceedings of the ASME 2019 International Manufacturing Science and Engineering Conference, June 10-14, 2019, Erie, PA, USA.
[REF-Weiss2] Klinger, A., & Weiss, B. A., “Examining Workcell Kinematic Chains to Identify Sources of Positioning Degradation.” 2018 Annual Conference of the PHM Society, Philadelphia, Pennsylvania (p. 9), 2018.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!




