Vision & Sensors | Robotics
What You Need to Know About Robot Safety Standards
A Q&A with A3’s Carole Franklin

All images source: A3
With more industries adopting robotic systems to provide greater efficiency and productivity, the need to ensure employees are safe around robots has never been higher. For over 40 years, the Association for Advancing Automation (also known as A3) has played a leading role in assuring that the robotics industry continues to proactively assess the safety environment and provide safety resources as robotic applications become more advanced, more capable and more popular.
Not only does A3 host the International Robot Safety Conference each year, but since 1982, A3 has supported industrial robot safety as a standards-developing organization (SDO) for both American (ANSI) and international (ISO) organizations. We sat down with Carole Franklin, director of standards development at A3, to talk about the importance of safety standards for robot systems and the different requirements needed to ensure safe deployments.
What are robot safety standards and why are they so important?
A robot safety standard is a collection of requirements for robot specifications and safe operations which all involved in the manufacture, sales and use of robots must follow. Having a standard set of international guidelines allows for easier use and sales of the robots, stabilizing markets and incentivizing the further growth of robotics as a whole.
How are robot safety standards different from government regulations?
Unlike government regulations, standards are developed by a volunteer committee of industry experts on a given topic. The goal is that a broad range of interests have a place at the table and have a fair chance to make their voices heard. It also gives the participants the opportunity to show that they are capable of effective self-governance on the topic. When it comes to robot safety standards, the topic of ‘safety of workers around robots in an industrial setting’ is crucial. The more we show a good-faith effort to follow the collected best practices in this area, the more our regulatory agencies can govern us with a lighter hand.
Industry standards are also updated more frequently than government regulations. This enables industry standards to address accelerating technological advances, such as the growing popularity of collaborative and mobile robots. These updated standards allow us to move away from historical guidance that was designed to keep people away from robots to new guidance that is adapted to keep people safe with robots. While adherence to these standards is often not required by law, the standards provide an effective framework for worker safety.
Does one safety standard cover all robots or are there different standards for the different types of robots? If multiple, what are the differences?

While the ultimate goals are similar – to keep people safe near robot systems – there are different safety standards with unique requirements specific to the type of robot systems being deployed. Conventional robots that are typically found behind a fence or other enclosure, and collaborative robots, which are designed to work safely alongside human workers, are the robot systems addressed in A3’s flagship standard, ANSI R15.06, which is a national adoption of ISO safety standard 10218 for both conventional and collaborative robot deployments.
Vision & Sensors
A Quality Special Section
The safety concern for conventional robot systems has been to restrict people’s physical access to potential hazards. The standard defines the maximum space that can be reached by the robot application’s moving parts, including end-effector and workpiece. Restricted access is typically achieved by enclosing the maximum space within a safeguarded space, with fencing to keep people out, or safeguards such as a light curtain or pressure-sensitive matting that detects a person in the space and brings the robot system to a safe stop.
While the R15.06 standard permits collaborative and mobile operation for conventional robot systems, it does not explain safety requirements for those types of installations. The next edition of R15.06 will include safety requirements for collaborative operation of robots, which the standard defines as a “state in which purposely designed robots work in direct cooperation with a human within a defined workspace.”
For these collaborative deployments, users need to understand the distinction between robot and robot systems. Integrators and users must consider whether the entire robot system, not just the robot, is “collaborative.” For example, the industrial robots referred to as “collaborative robots” represent only power- and force-limiting (PFL) collaboration. Other types of collaboration, such as speed and separation monitoring (SSM), can be implemented using non-PFL, or conventional, robot arms.
To ensure safety around collaborative robot systems, users should consider these practical steps:
- Understand the relevant standards: R15.06 / ISO 10218 and Technical Report RIA TR 606/ISO TS 15066.
- Consider the robot system as a whole, not just the robot arm.
- Select equipment such as end-effectors with the goal of avoiding any that pose a safety risk.
- Always conduct a risk assessment (RIA TR R15.306-2016 provides guidance and templates related to task-based risk assessment methodology).
- Watch robot poses and paths to avoid situations where a person could be injured, especially involving contact with face/ head/neck or clamping/pinching.
What about standards for mobile robots? And what steps are needed to ensure a safe deployment for these types of robots?
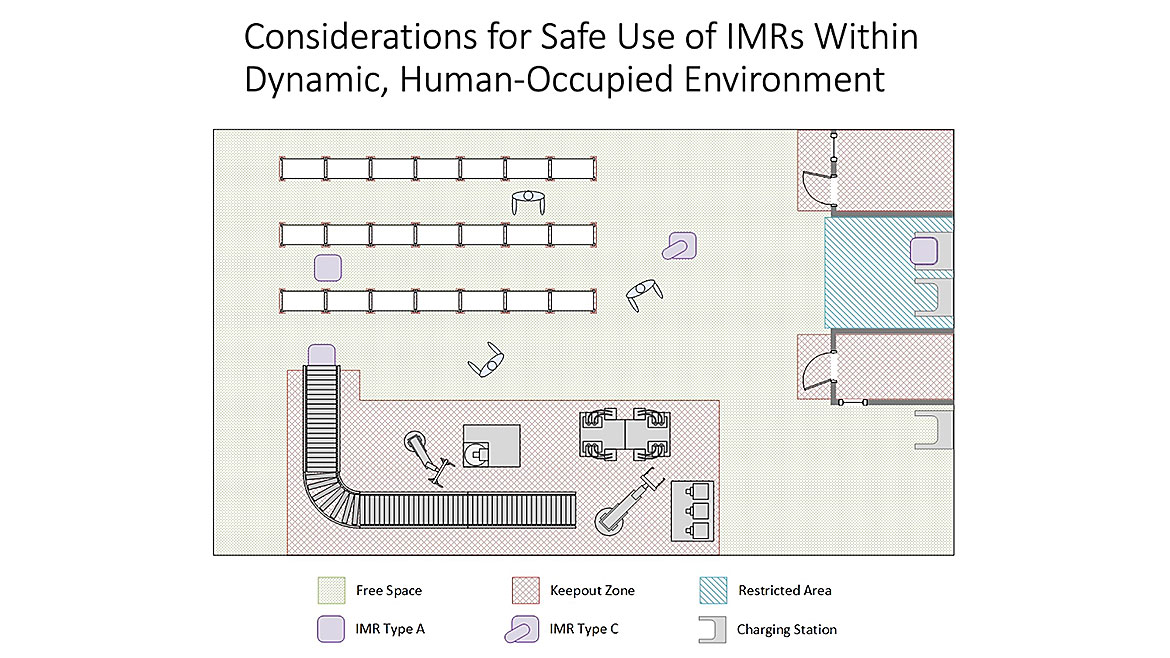
In late 2020, A3 published Part 1 of the R15.08 ANSI standard to establish safety requirements for industrial mobile robots (IMRs) as guidance for robot manufacturers. Part 2 of the R15.08, which has just been approved, establishes safety requirements for deploying IMR systems into an industrial environment, including integrating, configuring and customizing the IMR or fleet of IMRs into a site.
Safety guidance for IMRs continues to evolve along with new technologies and use cases. The most important step is to consider the entire mapped environment – a different mindset than a fixed robot cell or an automated guided vehicle (AGV). The integrator must assess the entire facility where the IMRs will operate and manage the deployed operating environment (DOE). Because the IMR system could be deployed in an existing facility, the DOE might not match the specified operating environment (SOE) provided by the IMR manufacturer, so could require plans for mitigating hazards arising from the mismatch. The layout analysis must intentionally design interactions between IMRs and workers as well as between IMRs and docking or charging stations.
As with the R15.06/10218 standards, risk assessment remains a critical element for safe deployment of mobile robots, particularly when they are not constrained to a defined path. Standards provide important guidance on requirements such as protective and emergency stops, collision avoidance, speed control and stopping distance, as well as cybersecurity concerns.
Looking for a reprint of this article?
From high-res PDFs to custom plaques, order your copy today!






